3D Printed Cable-Driven Mechanisms – Some Strings Attached
1 min read
Summary
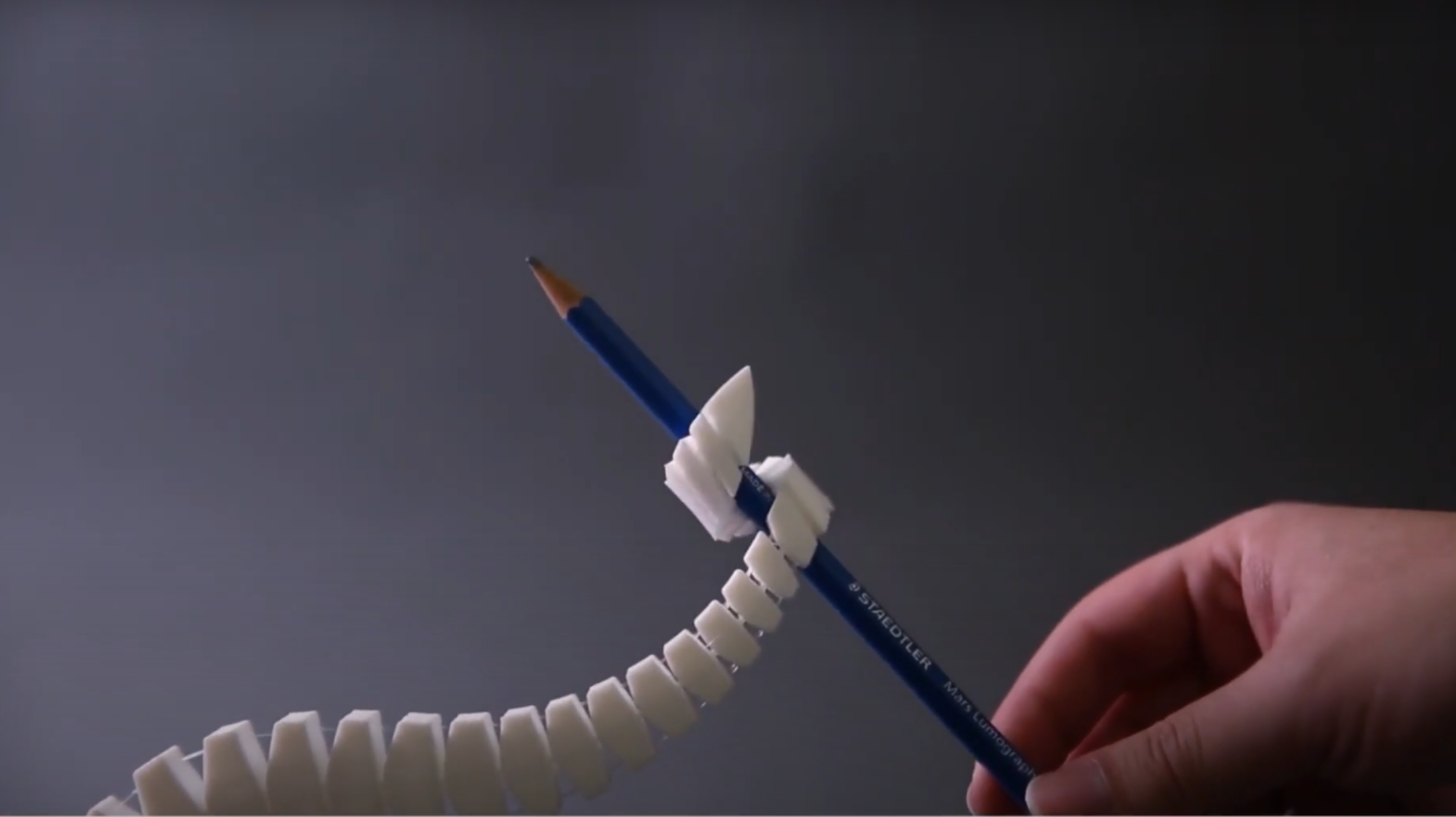
MIT and Zhejiang University researchers have designed a way to 3D print cable-driven mechanisms that require no assembly, using a new cable material that doesn’t stick to the PLA structure and providing four primitive motion components that can create a range of complex structures.
These are the bending component, the coil, the screw-like and the compressive component, which can be combined to make a gripping tentacle, a bird’s claw and a lizard-like walking robot, among other things.
The material of the cable can also be modified with features such as a one-way ratcheting mechanism or bumps for haptic feedback, and be tuned for required flexibility versus strength.
The cable-driven system is a classic way of reducing the weight - and thereby the rigidity and actuator strength required - in robot systems.